|
|
|


|
Sistema de localización de personal basado en tecnologías interactivas para su aplicación en entornos de obra (LINEO). El proyecto ha recibido financiación del Ministerio de Economía y Competitividad (MINECO), subprograma INNPACTO (IPT-2011-1241-390000), dentro de la línea instrumental de articulación e internacionalización del sistema, enmarcada en el Plan Nacional de Investigación Científica, Desarrollo e Innovación Tecnológica 2008-2011, y por la Unión Europea a través del Fondo Europeo de Desarrollo Regional (FEDE). |
El proyecto LINEO tiene como objetivo la evaluación y el desarrollo de un sistema totalmente funcional de localización en tiempo real (comúnmente denominados RTLS, del inglés “Real Time Location Systems”) de personal en ambientes no controlados, como son los entornos de obra.
Dadas las características de la problemática presentada (interacción de operarios y máquinas de gran tonelaje en entorno descontrolado), los niveles de precisión de localización y tiempo de respuesta del sistema son altamente exigentes. Tanto las máquinas como los operarios realizan actividades productivas en determinadas zonas de las obras en las que, a pesar de trabajar bajo una cierta coordinación, se dan muchas veces movimientos aleatorios debido a la naturaleza del trabajo y del entorno en que se realiza. Tras una analítica inicial de estas actividades productivas y de las velocidades normales de movimiento de operarios y máquinas, se ha estimado que el sistema de localización en tiempo real a desarrollar es un sistema completo que debe ofrecer medidas de posicionamiento con errores de precisión inferiores a un metro con tiempos de respuesta de actualización de medidas muy reducidos (inferiores al segundo).
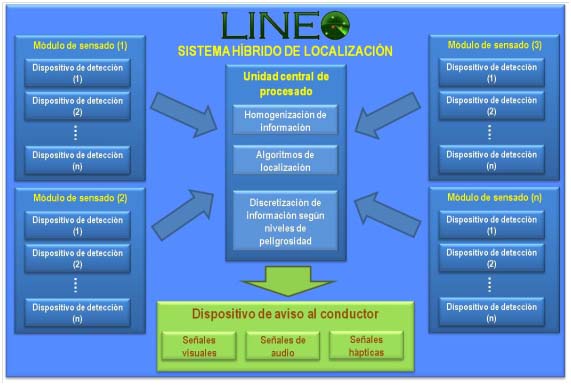
La solución a estudiar, diseñar, desarrollar y evaluar se basa en un sistema autónomo (no dependiente de ningún sistema central externo) que conste de un conjunto de módulos de sensado híbrido independientes pero con capacidad de comunicación entre sí dispuestos en puntos específicos del perímetro de la máquina cuya función será la de realizar el proceso de detección y localización de objetos en el entorno de la máquina sensorizada en base a una serie de tecnologías de sensado.
Las tecnologías que se han identificado a priori como más susceptibles de ofrecer un correcto funcionamiento y que serán el punto de partida del estudio en el proyecto son las basadas en sensores de ultrasonidos, radares tipo doppler, cámaras de reconocimiento de imagen, etc. Dado que cada una de estas tecnologías ofrece ventajas e inconvenientes según la situación específica, será la combinación de todas ellas, y alguna adicional si se estima oportuno, lo que ofrecerá la robustez y fiabilidad necesaria al sistema. Dichos módulos de sensado se comunicarán entre sí y con una unidad central de procesamiento situada en el interior de la máquina, mediante el uso de tecnologías inalámbricas (WiFi, MiWi, etc.) o en su defecto mediante el mínimo cableado posible. La unidad de procesamiento homogenizará y analizará toda la información recibida por los módulos de sensado y, gracias a una serie de algoritmos de localización y determinación de trayectorias de objetos, podrá discernir sobre el potencial peligro que dicho objeto representa y transmitir dicha información a un dispositivo embarcado en cabina que presentará la información al conductor a través diferentes formas de aviso (visuales, auditivas, hápticas, etc.) que garanticen la pro actividad del conductor ante las situaciones de peligro. El dispositivo minimizará la presentación de información en situaciones consideradas como "normales" al mismo tiempo que será mucho más explícita en las situaciones que se consideren como "de riesgo". De esta forma se evitarán distracciones innecesarias en el conductor del vehículo, al mismo tiempo que este contará con toda la información que pueda obtener de los módulos de detección cuando sea realmente necesario.
La participación del IRTIC se centra en liderazgo de la realización de las primeras pruebas de tipo RTLS en entornos de obra y el desarrollo del interface y equipamiento embarcado para aviso a conductor.
El proyecto ha recibido financiación del Ministerio de Ciencia e Innovación (MICINN), subprograma INNPACTO (IPT-2011-1241-390000), dentro de la línea instrumental de articulación e internacionalización del sistema, enmarcada en el Plan Nacional de Investigación Científica, Desarrollo e Innovación Tecnológica 2008-2011.
Dr. Pedro Morillo Tena (ARTEC)
Dragados S.A, Universidad Politécnica de Madrid (UPM), SICE S.A.