Robot con motores de corriente continua
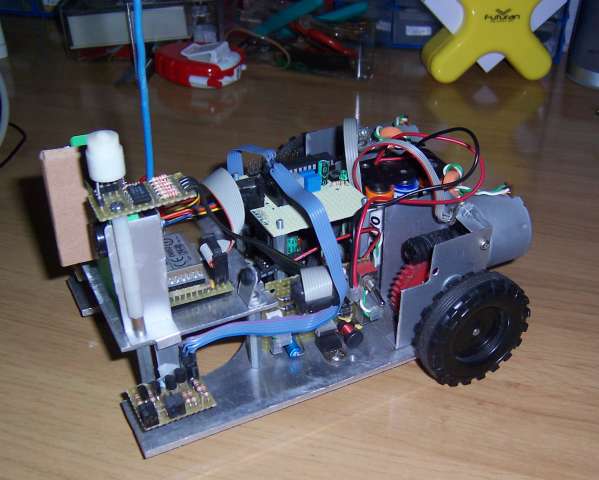
Esta es una imagen del robot con motores de corriente continua:
El control de velocidad de los motores se realiza con un algoritmo PID en un microcontrolador PIC.
Como sensores cabe destacar el medidor de distancias por ultrasonidos, los sensores de proximidad por infrarrojos y una brújula electrónica.
El conjunto se controla remotamente con un enlace radio que aporta comunicación serie a 9.600 bps. El control lo realiza un programa que se ejecuta en un PC y permite conocer la posición del robot y realizar acciones de alto nivel, como por ejemplo recorrer un camino definido por una lista de coordenadas.
Un video en con el robot en movimiento se puede ver aquí:
Get the Flash Player to see this player.
El movimiento se determina a partir de una lista de coordenadas que el robot va recorriendo.
El giro final se realiza indicando una dirección para orientarse y un desplazamiento hacia atrás.