Next: Controlling the use of
Up: Results
Previous: Results
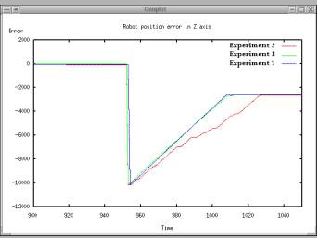
In order to show the improvems in control applications introduced by the task decomposition, the Z axis position error while the robot arm is picking a piece has been test following three approaches:
- Desired response in design phase ( Experiment 1, blue line).
- Real response with variable delays in implementation phase ( Experiment 2, red line).
- Integration phase: IMF task decomposition applied to the set of task ( Experiment 3, green line).
The results are showed in figure 11. In this plot, it can observed that the IMF decomposition is the approach that most follows the desired response, reducing the position error. While the real response without applaing the task decomposition increases the position error.
Josep Vidal Canet
2003-04-24