Next: Application files distribution
Up: Robot arm chess player
Previous: Robot arm chess player
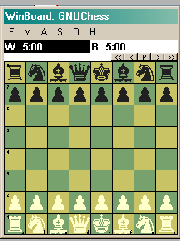
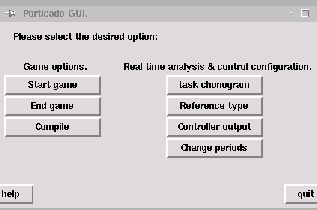
The basic application consists in a tcl/tk gui which controls the applications setting (reference type, controller periods, etc...) and launch a chess board so the user can make moves by picking pieces. This board communicates to the real time application side via fifos. Every time the board sends a move, a thread generates a reference for the move and other thread implementing the controller will make that the robot arm follows the reference.
This basic application, has been completed so the user can play chess by giving oral orders. For this purpose a voice recognition application has been embedded in a biscuit PC, using RTLEAST and some voice recognition tools based in hidden markov moddels devolopped by the group of PRHLT of UPV.
Josep Vidal Canet
2003-04-24