El Robot en si, con la definición de robot autónomo móvil extraído de la wiki. estaría formado únicamente por la parte móvil y la aplicación de control. Sin embargo, el comportamiento queda algo oculto y resulta difícil de probar y desarrollar nuevas funcionalidades.
La aplicación gráfica pretende ser un interfaz más amigable que la consola de comandos que dispone la aplicación de control y permite visualizar de forma gráfica la información que dan los sensores del robot, su posición y su orientación.
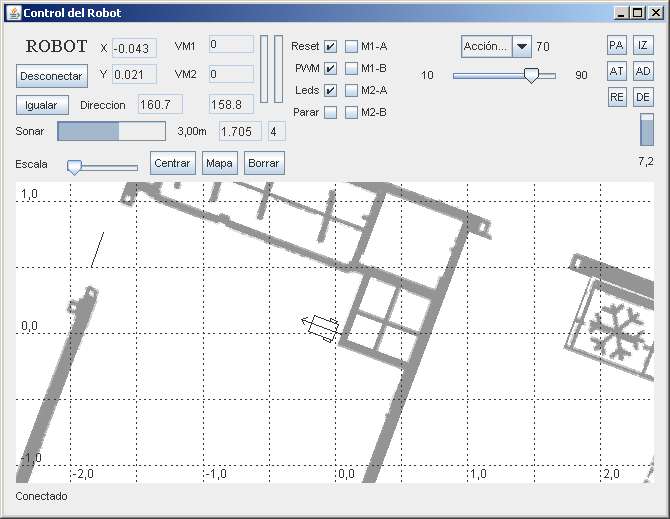
Una imagen de la interfaz desarrollada es la siguiente:
La aplicación gráfica está desarrollada en Java utilizando el interfaz de desarrollo Netbeans. El motivo principal de utilizar Java ha sido que nunca había programado con este lenguaje y quería aprender a utilizarlo. Al final ha sido un acierto pues el interfaz es muy amigable y el lenguaje resulta muy potente.
La conexión con la aplicación de control se realiza a través de un socket en ambos sentidos. Por un lado se recibe información en tiempo real del estado del robot y sus sensores, y por otro se puede comandar el robot con una serie de órdenes.
La interfaz de la aplicación gráfica es un diálogo en que se pueden distinguir las siguiente partes:
Permite comandar el robot con órdenes de acelerar, frenar y girar.
Se puede modificar la velocidad de desplazamiento
Se puede modificar la escala del panel gráfico
Permite conectarse y desconectarse de la aplicación de control
Muestra las coordenadas y la orientación del robot
Muestra la velocidad de los motores y se representan en dos barras verticales
Muestra la medida del sonar y la representa en una barra orizontal
Muestra la tensión de la batería y la representa con una barra vertical
Representa el plano de mi casa por donde se va a mover el robot sobre unas cuadrículas
Representa la posición y orientación del robot, así como el estado de sus sensores:
Permite manejar el robot con el ratón pinchando en una parte del plano.
También se tiene un control que permite modificar la escala en la que se representa el dibujo.
Es un línea en la parte inferior donde se muestra:
Aquí se puede ver un video donde se monitoriza en la aplicación gráfica el recorrido de una trayectoria.
Get the Flash Player to see this player.
Las coordenadas que definen la trayectoria aparecen al principio marcadas con un aspa rodeadas de un círculo y se van borrando según se van alcanzando.
El movimiento final es un giro para recuperar la orientación inicial y un pequeño recorrido hacia atrás que lo devuelven a la posición de origen. El video con el robot recorriendo esta misma trayectoria se puede ver en esta página.