The main aim of the LINEO project is the evaluation and development of a fully functional real-time staff location system in non-controlled environments, such as construction.
Due to the characteristics of the problems presented (interaction of operators and large tonnage machines in an uncontrolled environment), the degree of precision and response time of the system are highly demanding. Both machines and operators perform productive activities in some areas of construction in which, despite working under some sort of coordination, random movements can occur due to the nature of the work and the environment in which it is performed. After an initial analysis of these productive activities and the usual movement speed of operators and machines, it has been estimated that the real-time location system to be developed must be comprehensive and offer location measures with accuracy errors lower than one metre, with very short response times for measurement refresh rates (lower than one second).
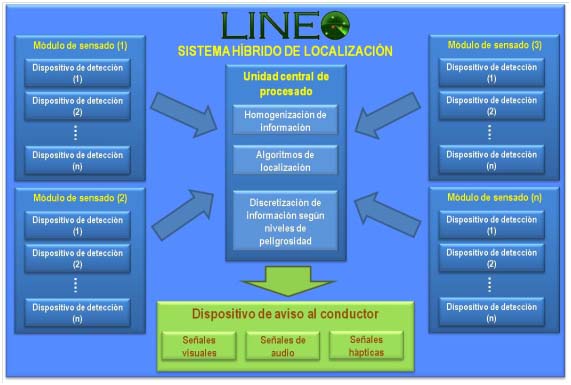
The solution that we are studying, designing, developing and evaluating is based on an autonomous system (not dependent on any external host) consisting of a set of independent hybrid sensing modules with communication capabilities, arranged in specific points on the perimeter of the machine, whose function is to make the process of detecting and locating objects in the environment of the sensor-equipped machine using a series of sensing technologies.
The technologies that have been identified a priori as more likely to function correctly and which will be the starting point of the study are those based on ultrasonic sensors, Doppler radars, image recognition cameras, etc. Since each of these technologies has advantages and disadvantages depending on the specific situation, all of them combined, with the possibility of additional ones if deemed appropriate, will offer the robustness and reliability required for the system. These sensing modules communicate with each other with a central processing unit located inside of the machine, by using wireless technologies (WiFi, MiWi, etc.) or, alternatively, with minimum wiring. The processing unit will homogenise and analyse all the information received by the sensing modules, and through a series of algorithms for locating and identifying object trajectories, it may discern the potential danger that the object represents and transmit this information to a device in the cabin that will show the information to the driver through different warning forms (visual, auditory, haptic, etc.) to ensure the driver’s proactivity in situations of danger. The device will minimise warnings in situations considered “normal” and will be much more explicit in situations deemed as “dangerous”. This way, unnecessary distractions will be avoided and the driver will get all the information from the detection modules when it is really necessary.
The IRTIC leads the first RTLS tests in construction environments and the design of the interface and equipment to warn the driver.
The project has received funding from the Ministry of Science and Innovation (MICINN), subprogramme INNPACTO (IPT-2011-1241-390000), within the instrumental line for articulating and internationalizing the system, part of the National Plan for Scientific Research, Development and Technological Innovation 2008-2011.
Dr. Pedro Morillo Tena (ARTEC)
Dragados S.A, Technical University of Madrid (UPM), SICE S.A.