|
|
|


|
Sistema de localització de personal basat en tecnologies interactives per a la seua aplicació en entorns d'obra (LINEO). El projecte ha rebut finançament del Ministeri d'Economia i Competitivitat (MINECO), subprograma INNPACTO (IPT-2011-1241-390000), dins de la línia instrumental d'articulació i internacionalització del sistema, emmarcada en el Pla Nacional d'Investigació Científica, Desenrotllament i Innovació Tecnològica 2008-2011, i per la Unió Europea a través del Fons Europeu de Desenrotllament Regional (FEDER). |
El projecte Lineo té com a objectiu l'avaluació i el desenvolupament d'un sistema totalment funcional de localització en temps real ( comunament denominats RTLS, de l'anglès " Real Time Location Systems " ) de personal en ambients no controlats , com són els entorns d'obra .
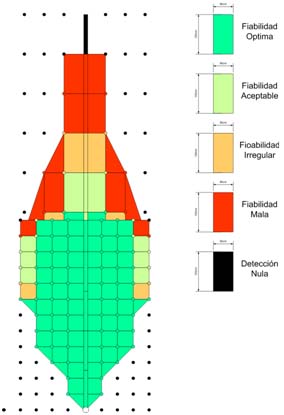
Donades les característiques de la problemàtica presentada ( interacció d'operaris i màquines de gran tonatge en entorn descontrolat ), els nivells de precisió de localització i temps de resposta del sistema són altament exigents. Tant les màquines com els operaris realitzen activitats productives en determinades zones de les obres en què , tot i treballar sota una certa coordinació , es donen moltes vegades moviments aleatoris causa de la naturalesa del treball i de l'entorn en què es realitza. Després d'una analítica inicial d'aquestes activitats productives i de les velocitats normals de moviment d'operaris i màquines , s'ha estimat que el sistema de localització en temps real a desenvolupar és un sistema complet que ha d'oferir mesures de posicionament amb errors de precisió inferiors a un metro amb temps de resposta d'actualització de mesures molt reduïts (inferiors al segon) .
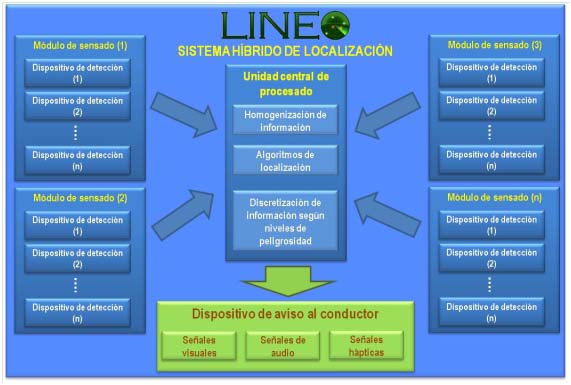
La solució a estudiar, dissenyar, desenvolupar i avaluar es basa en un sistema autònom ( no depenent de cap sistema central extern ) que consti d'un conjunt de mòduls de sensat híbrid independents però amb capacitat de comunicació entre si disposats en punts específics del perímetre de la màquina la funció serà la de realitzar el procés de detecció i localització d'objectes en l'entorn de la màquina sensoritzada en base a una sèrie de tecnologies de sensat .
Les tecnologies que s'han identificat a priori com més susceptibles d'oferir un correcte funcionament i que seran el punt de partida de l'estudi en el projecte són les basades en sensors d'ultrasons, radars tipus doppler , càmeres de reconeixement d'imatge, etc. Atès que cadascuna d'aquestes tecnologies ofereix avantatges i inconvenients segons la situació específica , serà la combinació de totes elles , i alguna addicional si s'estima oportú, el que oferirà la robustesa i fiabilitat necessària al sistema. Aquests mòduls de sensat es comunicaran entre si i amb una unitat central de processament situada a l'interior de la màquina, mitjançant l'ús de tecnologies sense fils (WiFi , MiWi , etc .) O, si no mitjançant el mínim cablejat possible. La unitat de processament homogenizará i analitzarà tota la informació rebuda pels mòduls de sensat i, gràcies a una sèrie d'algorismes de localització i determinació de trajectòries d'objectes, podrà discernir sobre el potencial perill que aquest objecte representa i transmetre aquesta informació a un dispositiu embarcat en cabina que presentarà la informació al conductor a través diferents formes d'avís (visuals , auditives , hàptiques , etc .) que garanteixen la pro activitat del conductor davant les situacions de perill . El dispositiu minimitzarà la presentació d'informació en situacions considerades com " normals " al mateix temps que serà molt més explícita en les situacions que es considerin com "de risc". D'aquesta manera s'evitaran distraccions innecessàries en el conductor del vehicle, al mateix temps que aquest comptarà amb tota la informació que pugui obtenir dels mòduls de detecció quan sigui realment necessari .
La participació de l'IRTIC se centra en lideratge de la realització de les primeres proves de tipus RTLS en entorns d'obra i el desenvolupament de la interfície i equipament embarcat per avís a conductor .
El projecte ha rebut finançament del Ministeri de Ciència i Innovació (MICINN) , subprograma INNPACTO ( IPT -2011-1241-390000), dins de la línia instrumental d'articulació i internacionalització del sistema, emmarcada en el Pla Nacional d'Investigació Científica, Desenvolupament i innovació Tecnològica 2008-2011.
Dr. Pedro Morillo Tena (ARTEC)
Dragados S.A, Universidad Politécnica de Madrid (UPM), SICE S.A.